Projet : étape 2
Boites de culture et nutriments
But: Implémenter l'environnement dans lequel vont évoluer nos futures bactéries. Il s'agira essentiellement de boites de culture dans laquelle vont croître des nutriments.
Concepts nécessaires: classes, constructeurs/destructeurs, surcharge d'opérateurs, héritage
Ces concepts sont expliqués dans les cours 16, 17, 18 & 19Fichiers nécessaires : partie2.zip
Mise en place
L'archive fournie pour cette étape contient donc une nouvelle version du fichier CmakeLists.txt permettant de compiler le matériel de cette partie. Elle contient aussi :
- des fichiers src/Config.hpp/cpp contenant notamment la définition d'un certain nombre de constantes utiles ;
- de nouvelles ressources dans le dossier res;
- un noyau de simulation src/Application.[hpp][cpp] dont dériveront tous vos tests de simulation graphiques;
- de nouveau programmes de test dans le dossier src/Tests.
Comme pour l'étape précédente, le prototypage des méthodes et la déclaration des attributs se trouveront dans un fichier avec l'extension .hpp tandis que leurs définitions se trouveront dans un fichier avec l'extension .cpp.
Il faudra procéder de la sorte tout au long du projet.
(si vous n'optez pas pour ce choix, il faudra adapter par vous-même les fichiers de test fournis).Description générale des classes à produire
Nous allons à cette étape commencer par modéliser l'environnement dans lequel vont évoluer nos futurs micro-organismes. On pourrait se contenter de modéliser une boite de culture unique, mais nous allons d'emblée prendre un point de vue plus général nous permettant de conduire plusieurs expériences simultanément, avec différentes boites de culture.
Nous allons donc partir sur la modélisation :
- de la notion de boite de culture. Il s'agit de l'environnement dans lequel les micro-organismes évolueront. Vous y ferez croître des nutriments générés à des endroits aléatoires;
- de celle de laboratoire (très basique). Pour l'heure, cette classe modélisera simplement le support sur lequel sont posées les boites.
A cette étape vous commencerez à utiliser vos premières applications graphiques. Une classe Application.[hpp][cpp] est fournie; elle servira de base à tous vos tests de simulation graphiques.
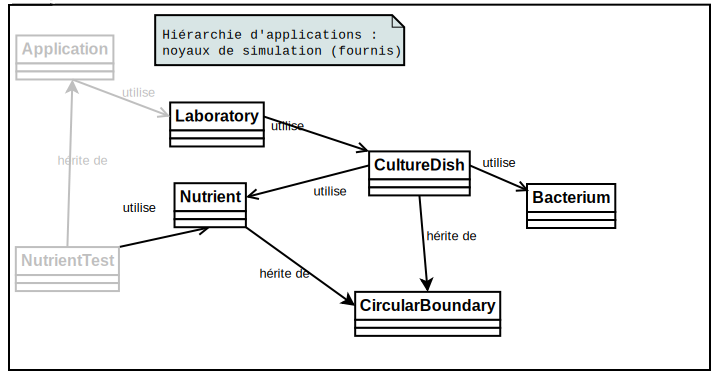
Voici, pour résumer, l'architecture à laquelle vous devrez aboutir au terme de cette étape :
Procédons donc maintenant au début du codage. Dans votre programme, vous veillerez à encapsuler proprement vos classes, notamment en ne donnant pas d'accès public ou protégé à vos attributs. Vous fournirez aussi systématiquement les destructeurs.
Les descriptions qui vous sont suggérées ci-dessous sont minimales. Il s'agit d'une première ébauche que nous serons amenés à affiner au fur et à mesure que le projet progressera. Libre à vous également d'y ajouter toutes les méthodes et tous les attributs supplémentaires qui vous semblent nécessaires.
Modules à programmer
Les volets (modules) à mettre en place pour finaliser cette étape sont les suivants :
Cette étape ne présente pas de grande difficulté du point de vue de la programmation. Elle exigera cependant de votre part un effort de compréhension pour bien saisir comment s'articulent entre elles les différentes "pièces du puzzle" que vous devez compléter et pour appréhender l'utilité des outils qui vous sont fournis.
Au terme de cette étape vous disposerez d'un environnement de simulation où vous pourrez poser des nutriments à des endroits aléatoires dans plusieurs boites de culture et les voir croître automatiquement :
|
← Ajout manuel de sources de nutriments (au moyen d'une touche), croissance des nutriments en fonction de la température et gestion de plusieurs boites, dont une seule est visible à la fois. |
Retour au document principal